
この日の朝いちばんのニュースで球磨川の氾濫は知り、と非常に驚きました
被害にあわれた皆さまには心よりお見舞いを申し上げますとともに、一日も早い復興をお祈りいたします
さて、レゴロボ2日目の学習内容は2つ
「信地旋回と超信地旋回」と「関数」です

信地旋回と超信地旋回
ざっくりいうと戦車みたいやターンです
馴染みのある乗り物である自転車や自動車ではできない動きですが、ロボットを動かすにはとっても重要
その特性を理解してもらいます
参考に
(授業で使った資料とは異なります)
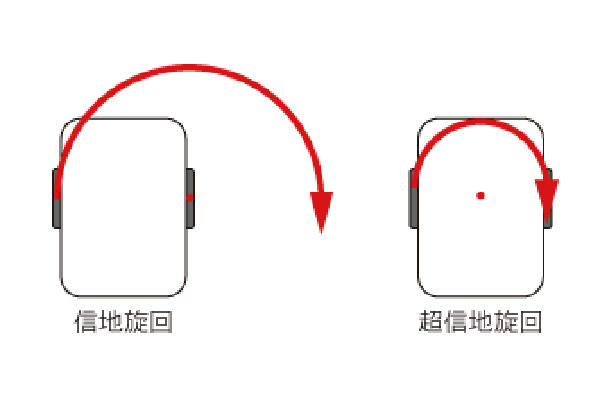
どう違うかが理解できると、どっちを使った方がいいかを選べるようになりますね
関数
ざっくりいうとプログラミングの効率化です
複数の命令をひとまとめにしておく方法を学びました
これはちょっと難しかったようです
慣れるまだ練習が必要ですが、使えれば楽にプログラムを組むことができます
「引数」とか「戻り値」というものもあるのですが、それは必要になってからです
詰め込むと頭がパンクしてしまいますので…(-へ-;)
ちなみに、レゴロボでは「マイブロック」という名前がついています
次回のレゴロボ
次回からはセンサーを使ってロボットに感覚を与えていきます
雨が続きますが、これ以上被害が出ませんように


![[Miniロボ] 初級ロボット競技にチャレンジ!](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2020/11/b49fa26656a61509bc3772961c798fc7-150x150.jpg)
![[レゴロボ]4月3週目 プログラムをかんたんにしよう](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2019/04/8fdf735d9f09dd30e9571009f3c47493-150x150.jpg)

![[イベント情報] ロボット&プログラミング](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2020/09/196a93567b6f2b8db42c8c1d1ddd42b9-150x150.jpg)
![[レゴロボ]1Dayスクール – アームロボ](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2019/12/15de92a76e1aee2ecf8981f687c0715c-150x150.jpg)
![[体験教室]ウィンタースクールを開催します](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2023/12/banner_1000x618_winterschool2024-120x90.jpg)
![[体験教室]オータムスクールを開催しました](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2023/11/DSF9719-120x90.jpg)
![[体験教室]オータムスクール2023](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2023/09/header_pc_autumnschool2023-120x90.jpg)
![[冬のロボコン] JRC2023を開催しました](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2023/03/DSCF5328-120x90.jpg)
