
冬になり、新型コロナが一層世間を騒がせていますが、今期のレゴロボを1月にスタートしました!
これから5名の生徒たちが7ヵ月全18回の内容を学んでいきます。
初日の今回は次のとおり
- ロボット、プログラミングソフトのチュートリアル
- 前進
- 旋回(ピボットターン)
チュートリアル
体験会でみんな一度は触っていますが、まずはどうやってロボットをプログラムで動かすか?
そのおさらいからです。
使用するロボットは「マインドストームNXT」です。

これは前世代のものですが、操作性がとてもシンプルなので現世代より子ども向けです。
しかも、つくるロボットやカリキュラムの蓄積が豊富なので、初めての学習用に使用しています。
そして、プログラミングソフトは「EV3ソフトウェア」です。
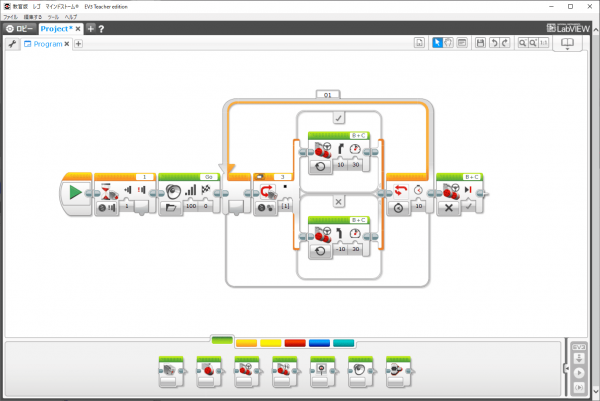
マインドストームを制御する専用のプログラミングアプリです。
グラフィカルで見やすく、マウス操作で簡単に扱えます。
意外とある程度は細かい制御もできるので、経験年数ごとにステップアップしていきやすいと思います。
前進
ただ前に進むだけ!
…なんですが、大事なポイントもあります。
- 出力ってなに?
- 制御する対象は?
- 速さと距離の設定
実際に距離を測りながら、円周率など算数を用いて理論値と測定結果を見ていきます。
ロボットがどんな制御をやっているのかも説明します。
プチ課題も出しました。
「100cm進むにはどのくらいタイヤを回せばよいか?」
これはいくつか解き方があります。
それぞれの解き方を説明しながら、自分が考えつかなかった方法を知り、答えの導き方はひとつじゃないことを学習します。
旋回(ピボットターン)
今回は信地旋回という方法でロボットをターンさせます。
ピボットターンとも言います。
片輪で旋回する方法のことです。
ちゃんと狙い通り90°真横に曲がれるかがポイントです。
今回は「タイヤ1.5回転」がちょうど90°でした。
なぜそうなるのか?
タイヤの直径とロボットの車幅が関係します。
計算で出す方法もありますが、そのためには「円周率」と「約分」の理解が必要なので、詳しくはもっと進んでから生徒たちに解説します。
課題にチャレンジ
それぞれくじ引きして、引いた色の場所に入ってゴールという課題です。
ちゃんと狙いどおりの場所を通れるか?
正しい順番で正しい数だけ命令できるか?
それが今回のポイントです。
ちなみに、ロボットは地面の滑り具合、でこぼこ、バランスなどで期待どおりに進まないことも多々あり。
なのでできる限りコースの中央を通るようにしないとカベにひっかかります。
簡単そうに見えますが、意外と「なんでうまくいかないの!?」となります。
そこで大事なのが「トライ&エラー」

試行錯誤と問題解決
まず考える
次に試す
そして結果を分析
修正したり追加していく
という過程をくり返して少しずつ進めていきます。
大人だとPDCAサイクルと言われる進め方ですね。
いかに試行錯誤するか。
問題解決のポイントです。
チャレンジ結果
結果はうまくいったのか?
動画をご覧ください
講座について詳しくはコチラ↓↓↓

![[体験教室]オータムスクール2023](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2023/09/header_pc_autumnschool2023-150x150.jpg)
![[イベント案内]1Dayスクール開催します](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2020/02/79297141ac71aeb187bafbb32cd03a49-150x150.jpg)

![[レゴロボ] ものをつかめるアームロボ](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2022/01/20220109_legorobo-thumbnail-150x150.jpg)
![[Miniロボ]ペットロボ – カメさんバージョン](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2019/11/3a9055d23f92dd6e3d53ed78c493f6c6-150x150.jpg)

![[体験教室]大津町で開催しました!](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2025/04/DSCF6490-120x90.jpg)


