
楽しんで学ぶ1Dayスクールをこの春休みも行いました。
・3月31日(日) … つかむアームつきロボット
・4月4日(水) … 自動ブレーキロボット
という内容でした
ロボットづくり
今回もパーツからロボットを組み立てていきます
図を見ながらですが、立体的なのでパッと見ではわからないことも…
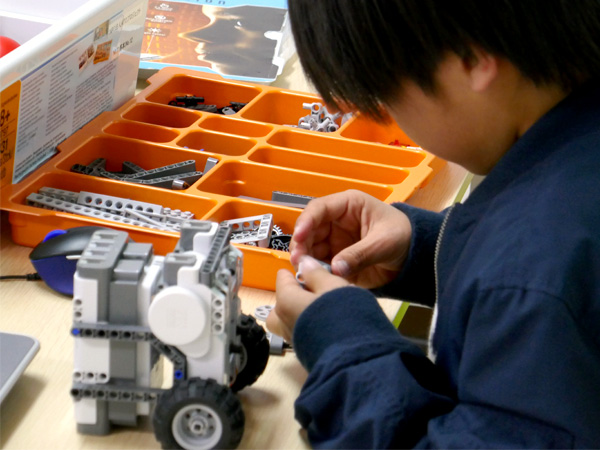
図と同じ向きに実物も合わせたり
クルクル回しながら確認したり
長さをよく確かめながらつくったり
つくるのにも工夫がいるんですよね

ちゃんと確かめないと
完成後に「なんかちがうー」となってやり直し!なんてことも…
ちなみにアームロボットのほうはこんな感じです
ギアを使って左右逆方向に同時に動く仕組みです
けっこうシンプルなつくりでできるようになっています

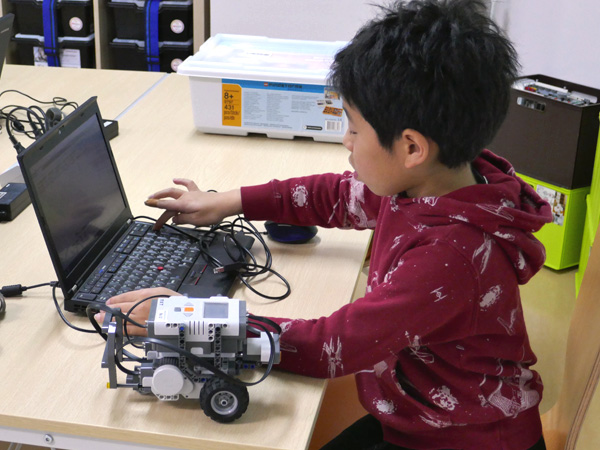
プログラミング
ソフトはいつもどおりのビジュアルプログラミングです
見た目でぱっと構造がわかるようになっているので、初心者には難しいプログラムもかんたんにできるようになっています

超音波センサーのほうは「くり返し」と「条件分岐」を使った制御です
言葉だけ聞くとなんか難しそう…と感じますが、今回はいたってシンプル
- カベから遠ければ→止まれ
- カベに近ければ→進め
というように命令していきます
課題にチャレンジ
【アームロボット】
ブロックをアームでつかんで移動させる「自動運搬」
モーターの回転数を制御して進んでつかんでをやっていきます
簡単そうに見えるけど…
扱うモーターが増えると”いつ”、”どのモーター”を動かすか考える量が増えるので意外と難しくなります
今回のアームはつかむ力が強くなるようなギアの組合せになっています
なのでモーターの回し過ぎはダメ!
簡単にアームが外れてしまいます
実際にはプログラムがロボットにダメージを与えるということも学びになったかな?

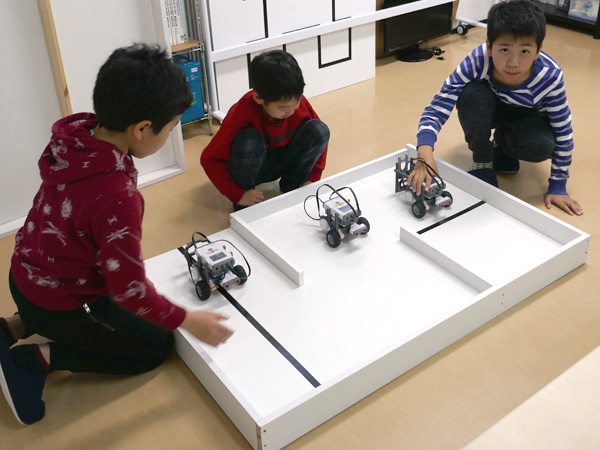
そして【自動ブレーキ】
カベや前方車両にぶつからない「自動ブレーキ」
(そのまんまですね)
前述の「条件分岐」も入れ子にしてうまく使うと段階を分けてスピードを上げ下げすることができます
でもそれにも限界が…
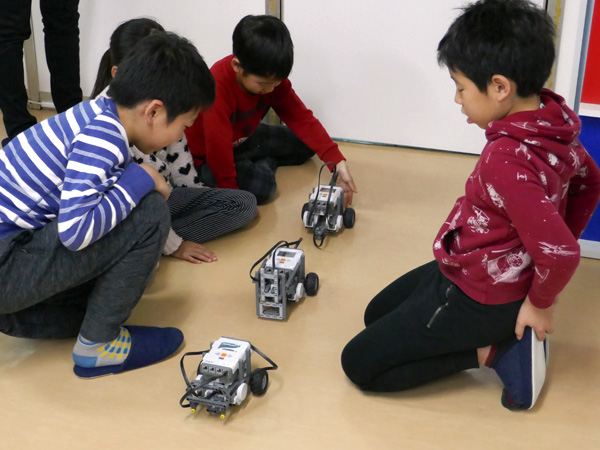
ということで無段階で加減速する「フィードバック制御」も体験してもらうことにしました
センサーから入る情報(入力)によってモーターを回す力(出力)を自動で変えるという考え方です
すると不思議なことに人がブレーキを踏んでいるみたいにゆっくり止まるロボットに!
これはエアコンなどでも使われている方法です
ロボット制御は意外と身近なところにあるもんです
課題の様子は動画でもご覧いただけます

![[体験教室]オータムスクールを開催しました](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2023/11/DSF9719-150x150.jpg)
![[特別企画] 夏休みロボロボ実験室](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2020/08/981a2e84d6569ebcb6b1ba190f7d863e-150x150.jpg)

![[体験教室]大津町で開催しました!](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2025/04/DSCF6490-150x150.jpg)
![[イベント情報] ロボット&プログラミング2021 第1弾](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2021/06/efe4b4365fb398a3286119d5e754af3f-150x150.jpg)

![[体験教室]大津町で開催しました!](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2025/04/DSCF6490-120x90.jpg)


