
的をめがけてピンポン玉をシュート!
今回は2台を使ってロボットづくり
シューターロボにチャレンジしました
前回学んだライントレースと組み合わせて、走らせながらシューティングしていきます
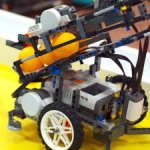
シューターロボ
ロボットの仕組みはシンプルなゴム動力です
反動を活かしてピンポン玉を打ち出しています
組み立て手順は60近くあるので、けっこう大変です
完成に45分くらいかかりました
ライントレース
これは前回の復習から
分岐処理を使って、ロボットが自動で左右どちらに進むかを判断しています
ライントレースの基本「ON-OFF制御」です
ロボットの動きを確かめたらプログラミング
そして今回はライントレースを「いつやめるか」を追加しました
処理にかかる時間を利用したテクニックです
チャレンジ
ピンポン玉や打ち出し部分はガッチリ固定されていないので、飛んでいく方向はまちまち…
角度やプログラムを調整して何度もチャレンジです
次回はライントレース+シューターロボでミニ競技にチャレンジしていきます!

![[Miniロボ]4月3週目 ロボットに重りをつけてみよう](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2019/04/a7ef3f3f546a2f5e9b3e8606e1998605-150x150.jpg)

![[レゴロボ] ぶつからないロボ!?自動ブレーキ](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2021/05/20210516_legorobo-150x150.jpg)
![[Miniロボ]ペットロボ – カメさんバージョン](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2019/11/3a9055d23f92dd6e3d53ed78c493f6c6-150x150.jpg)

![[体験教室]大津町で開催しました!](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2025/04/DSCF6490-120x90.jpg)


