
このレゴロボではプログラムのレクチャーが割合多めですが、今回はロボットづくりがポイント
複数のギア(歯車)を組みあわせてモノをつかむアームロボにチャレンジします

ギア比って?
つながれた2つのギアの歯の数の比率です
例えば、下の画像を見てみましょう
歯の数は左が8枚、右が24枚
なので、ギア比は1:3です
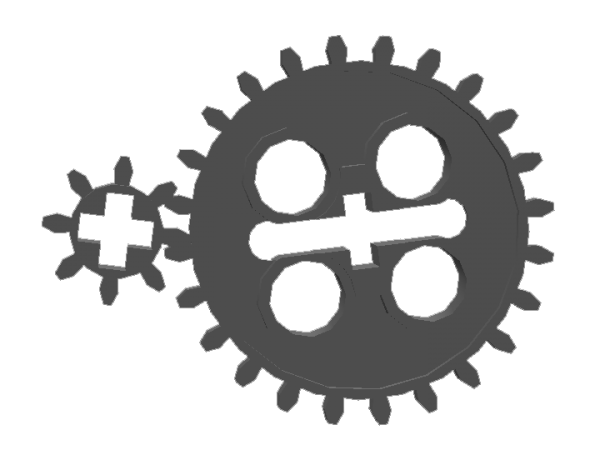
これによってモーターの出力は同じでも、より大きな力や速度をかけることができます
ちなみに、きちんとかみ合うように歯の大きさは同じものを使います
なので、歯車の大きさとほぼ同じです


アームをつかってみよう
課題はブロックをつかんで指定の場所まで運ぶというもの
センサーは使わずに単純にモーターの回転数だけでロボットの動きを指定します
簡単そうには見えますが…意外とみんな苦戦しました


さて、それはなぜか?
アームがあることで、制御する対象がこれまでの左右両輪の2つから3つに増えます
これで、いつどのモーターを制御するか考えることが増えたためですね
今後もアームなどは使っていくので、次回はもっと上手にできるかな!?

![[Miniロボ] ロボットリレーで荷物を運ぼう](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2021/12/20211219_minirobo-4-150x150.jpg)
![[Miniロボ]ピンポンシューター](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2020/02/890465e1ab48b13f397717d163618f85-150x150.jpg)
![[冬のロボコン] JRC2023を開催しました](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2023/03/DSCF5328-150x150.jpg)


![[体験教室]大津町で開催しました!](https://www.npo-hitoproject.or.jp/roborobo/wp-content/uploads/2025/04/DSCF6490-120x90.jpg)


